Der SUMO nutzt zur Lagebestimmung und Orientierung einen Beschleunigungssensor, einen Drehratensensor und einen GPS Empfänger. Diese sind von äußeren Einflüssen weitgehend unabhängig.
Ein Drucksensor für die Höhenbestimmung, ein Staudruckrohr für die Geschwindigkeit relativ zur Luft oder ein Magnetkompass für die Bestimmung der Orientierung zur Erde wird nicht genutzt.

Höhe, Geschwindigkeit (nur gegenüber der Erdoberfläche) und Richtung wird einzig dem GPS entnommen. Das funktioniert so lange, wie sich der SUMO nach vorne bewegt, damit das GPS eine korrekte Richtung messen kann.

Für einen Quadcopter funktioniert das nicht. Er braucht eine Richtungsinformation auch wenn er steht (was er die meiste Zeit tut). Daher ist ein Magnetkompass eingebaut. Unser bebop2met basiert auf dem Parrot Bebop2 und dort ist dieser leider sehr nahe der restlichen Elektronik verbaut und liefert daher nur unpräzise Informationen. Ein weiteres Problem ist offenbar die weite Streuung der einzelnen Sensoren in den verschiedenen Quadcoptern. Zudem sind wir auf über 65° Nord und die x-y Komponente des Erdmagnetvektors ist sehr klein.

Am Ende verbringen wir weite Teile des Tages damit, die für die Kampagne neu gekauften Quadcopter magnetisch zu kalibrieren, indem der Quadcopter in einer tanzartigen Performance in verschiedenen Winkeln zur Erde gehalten und gedreht wird.

Die Vorhersage hat sich leider bewahrheitet und das Wetter war die ganze Woche unpassend für unsere Messungen. Der SUMO fliegt Profile zum Sammeln von Vergleichswerten. In einer Wolke bei 1000m kommt es wieder zur Vereisungen. Das Flugzeug kehrt um und landet sicher.
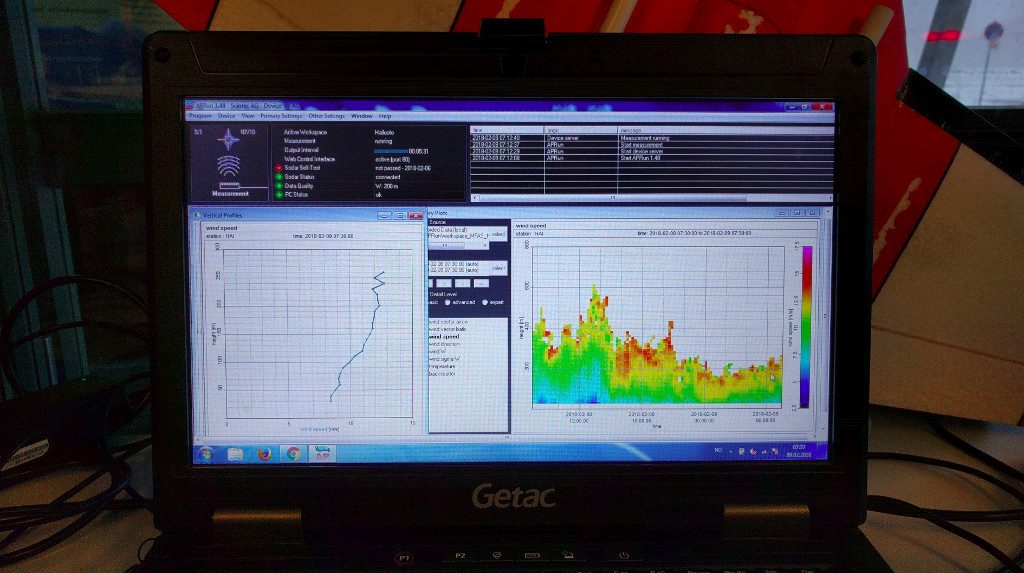
Die Messungen finden mit mehreren Systemen parallel statt. Für die unteren 10m ist der Mast aufgebaut, darüber misst von 2m bis 200m der bebop2met, von 40m bis 1800m der SUMO und parallel dazu das SODAR. Bei hoher Windgeschwindigkeit oder Luftfeuchtigkeit reicht der akkustische Puls allerdings nicht so hoch und die messbare Höhe nimmt deutlich ab.

Etwas beunruhigend ist auf dem Eis am Rand auftauchendes Wasser, welches zu Slush-Eis führt. Die Einheimischen erklären uns, dass der Südwind das Seewasser gegen das Land drückt und das Wasser so nach oben gedrückt wird. Unkritisch.