Es geht nochmal raus zur Station zu ein paar experimentellen Flügen.
Wir testen den Quadcopter, letztlich war neben den SUMO Meßflügen aber zu wenig Zeit (und Sonnenlicht) für Neues.

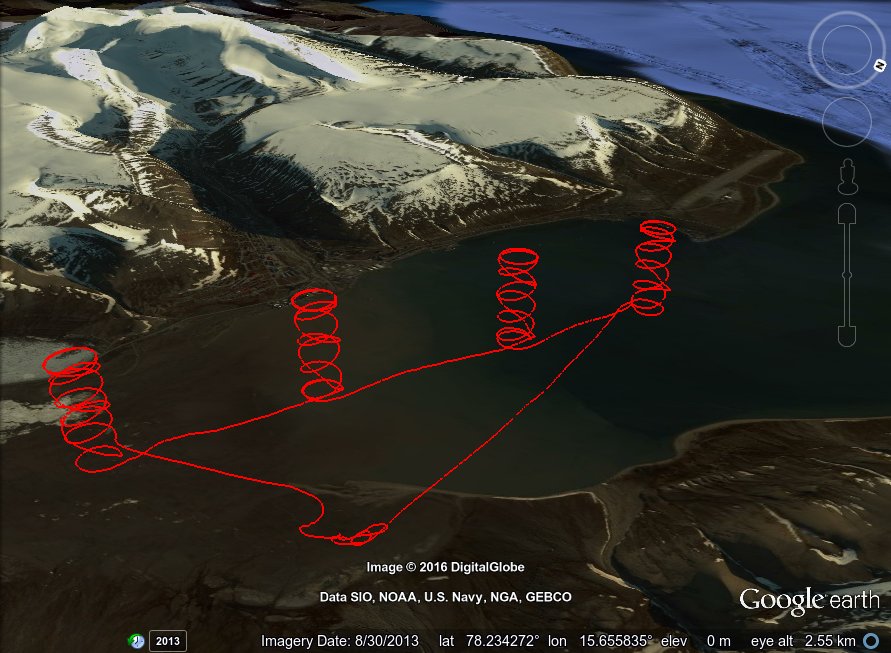
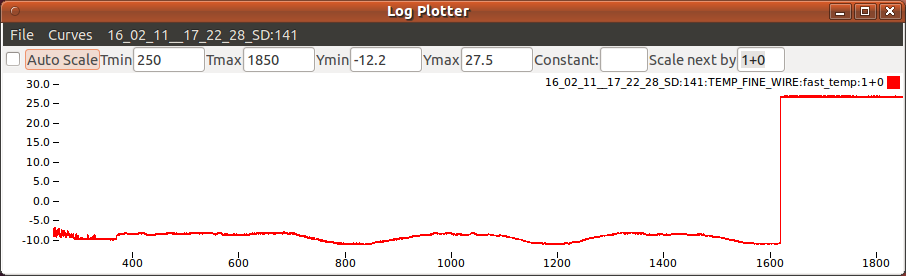
Auf dem Heimweg zu UNIS halten wir am Strand und machen einen letzten Flug mit vier Profilen über See/Land. Über der Wassergrenze liegt eine dünne Wolke. Der Sensor für die relative Luftfeuchtigkeit ist den gesamten Flug über in der Sättigung. In den unteren 150m zeigt der PT1000 Temperatursensor eine erratische und offensichtlich zu kalte Temperatur (-12°C gegenüber konstanten -4°C des Feuchtesensors). Wir haben die Flugperformance im Blick – es zeigen sich aber keine Auffälligkeiten.
![]()
Nach der Landung sehen wir, dass die Propellervorderkante und die Flügelspitze mit klarem Eis überzogen ist.