The SUMO uses an acceleration sensor, a gyro rate sensor and a GPS receiver for orientation and position. They are largely independent of external influences.
A pressure sensor for altitude measurement, a pressure tube for the velocity relative to the air or a magnetic compass for determining the orientation towards the earth is not used.

Altitude, speed (only relative the earths surface) and direction are taken only from the GPS receiver. This works as long as the SUMO moves forward so that the GPS can measure a correct direction.

This does not work for a quadcopter. It needs directional information even when it is hovering (which it is most of the time). Therefore a magnetic compass is installed. Our bebop2met is based on the Parrot Bebop2 and unfortunately the sensor in it is installed very close to the rest of the electronics, It provides imprecise data. Another problem is apparently the wide scattering of the sensors in the various individual quadcopters. In addition, we are at over 65° north and the x-y component of the earths geomagnetic vector is very small.

In the end we spend much of the day magnetically calibrating the quadcopters newly purchased for the campaign by holding and spinning the quadcopter at various angles to the earth in a dance-like performance.

The forecast has unfortunately come true and the weather was inappropriate for our measurements throughout the week. The SUMO flies profiles to collect comparison values anyway. In a cloud at 1000m we are back to the icing. The plane reverses and lands safely.
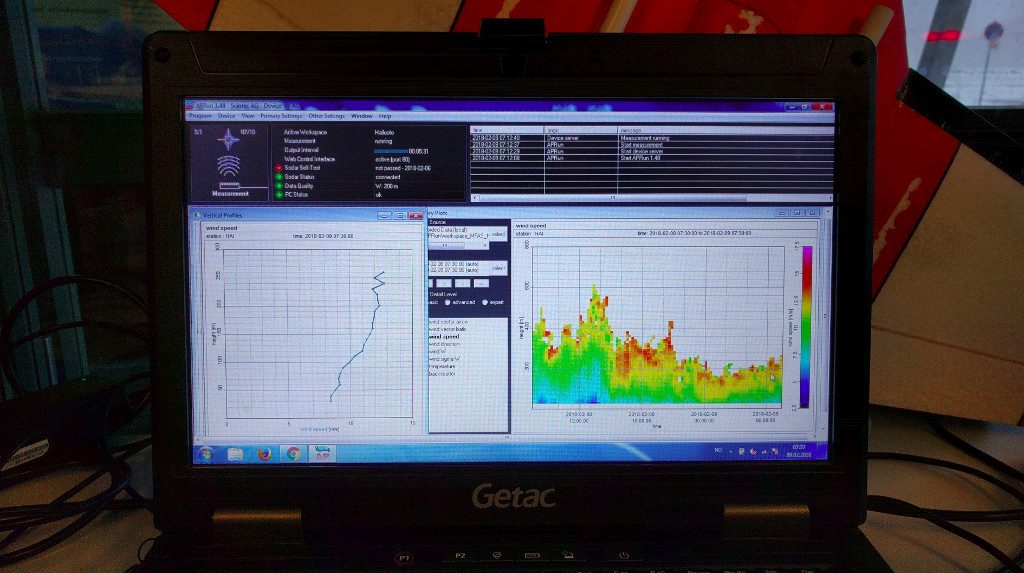
The measurements take place in parallel with several systems. For the lower 10m the mast is set up, above that the bebop2met measures from 2m to 200m, from 40m to 1800m the SUMO collects data and parallel to all that is the SODAR. At high wind speed or humidity, however, the acoustic pulse does not reach as high and the measurable altitude decreases significantly.

Somewhat troubling is water that appears close to the beach. It leads to little seas of slush ice. The locals tell us that the south wind pushes the seawater against the land and the water is pumped up.