Nach einem zusätzlichen Eis-Sicherheitskurs bei UNIS geht es vormittags hinaus zum Schiff. Ein großartiges Stück niegelnagelneue Technik, etwas verwirrend. Der wichtige Information: Es gibt drei Treppen, alle enden auf Deck 5. Die hintere geht nach oben, die mittlere und vordere nach unten.

Die Ausstattung ist im Vergleich zu manch älterem Forschungsschiff sehr komfortabel. Unsere Zweierkabine ist ganz vorne an Backbord, die einzige mit nur einem Bullauge. Es gibt eine eigene Dusche, Internet, Schreibtisch und einen Flachbildschirm mit live Schiffsinfos.

Man ist nicht nur Passagier, sondern Teil des Schiffes. Alles ist voller Geräte, Winden, Kräne. Mit Sicherheitsschuhen und Helm ausgestattet erkunde ich vorsichtig das Schiff, versuche unsere Gerätschaften an Deck ausfindig zu machen.

Mittags wird der Anleger für ein anderes Schiff gebraucht, wir tuckern los. Das Schiff bewegt sich, ein leichtes Unwohlsein. Vor Longyearbyen gehen wir virtuell vor Anker, neben uns der deutsche Forschungseisbrecher Maria S. Merian.

Nachmittags gibt es eine Einführung in das Schiff mit einem Rundgang, bei dem wir auch ins Rettungs (U-)Boot krabbeln dürfen. Anschließend gibt es einen kurzen Abriss über das Programm der nächsten Tage. Danach die Sicherheitsübung.

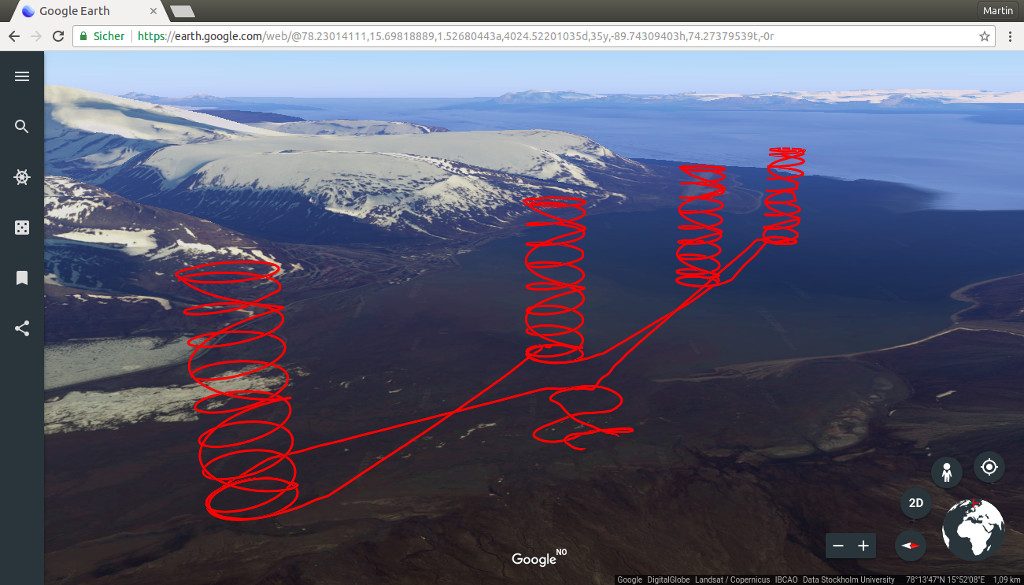
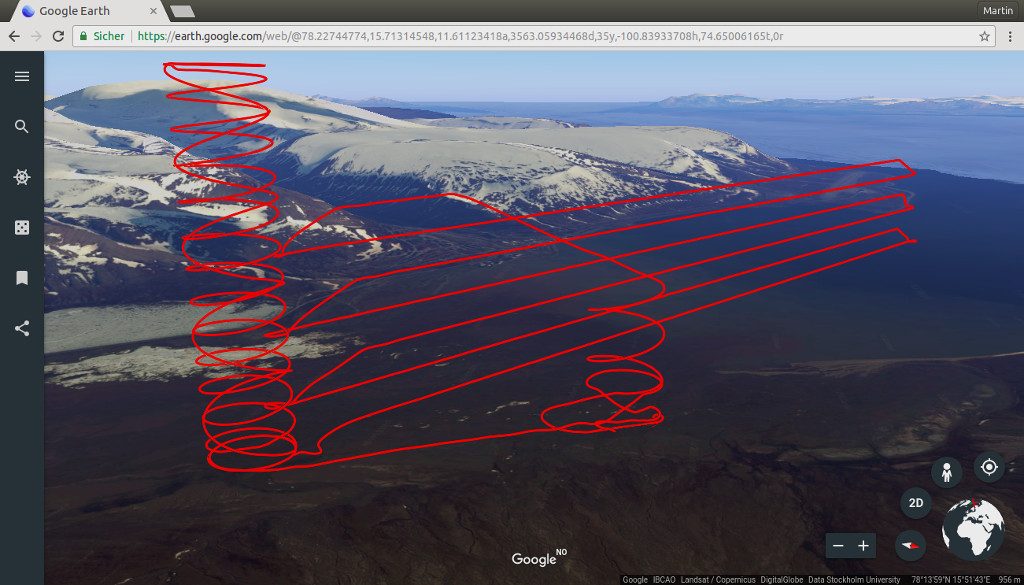
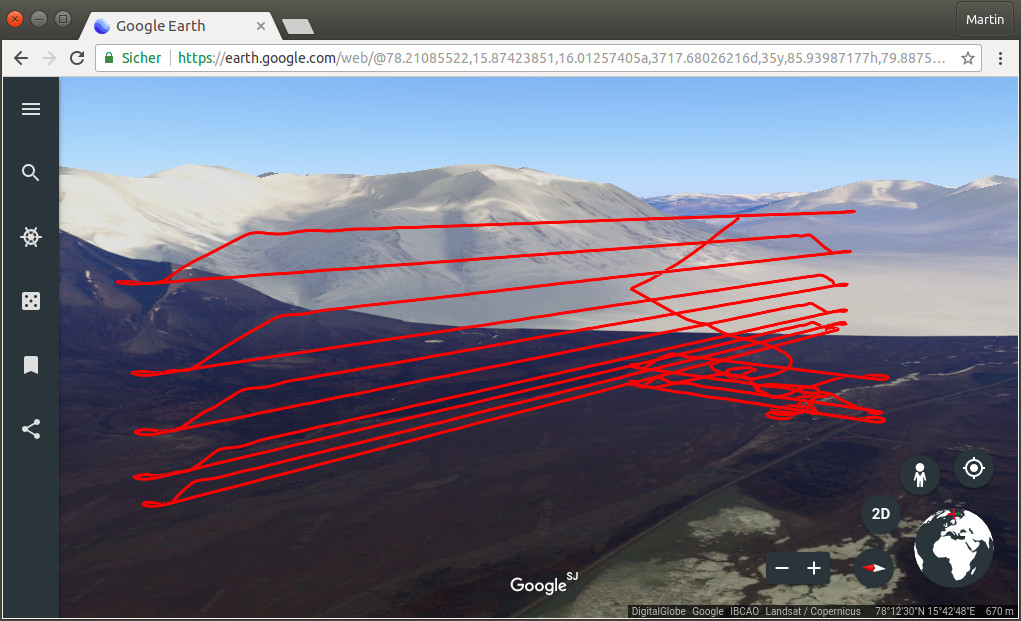
Unsere Flieger, Netz und Sandsäcke sind inzwischen im Heli-Hangar angelangt.

Sehr vorsichtig gewöhnen wir uns an den Gedanken, von hier aus unsere Flugzeuge zu fliegen. Dem Rand des Helidecks nähert man sich nur behutsam, es ist spooky, dort über die Klappreling auf das tiefe, dunkle Meer zu schauen.